Calcul en roulis, pilonnement et tangage
Remarque préliminaire : La page ci après explique le comportement du calcul en roulis. Les même principes sont appliqués aux calculs en pilonnement et tangage.
Généralités
Le calcul en roulis permet d'évaluer les caracétristiques du modèle (ensemble des objets) ou d'un objet particulier en fonction des angles de roulis que l'on peut lui imposer. Le principal objectif de ce type de calcul est de déterminer le couple de redressement que la carène va générer.
Le panneau de paramétrage du calcul en roulis permet de définir les conditions du calcul et de lancer ce dernier.
 |
Le calcul en roulis peut s'effectuer selon deux modes principaux :
|
Paramètres d'entrée du calcul
Pour obtenir des résultats réalistes et exploitables, il est primmordial de fournir des valeurs correctes pour la position du centre de gravité du modèle (attendus ici dans le repère absolu).
En calcul dit "fixe", seul la position verticale du centre de gravité a une influance sur la courbe des bras de levier de redressement (GZ). En calcul libre, les positions sur X et Y sont indispensables, ainsi que la masse du modèle.
La position du centre de gravité du modèle (et sa masse) peut être importée à partir des propriétés de chaque objet si celle-ci ont été renseignées, à l'aide du bouton importer. C'est un bon moyen de ne pas avoir à saisir les valeurs à chaque fois. Lors de l'import des valeurs, HullCAO fait un cumul des masses de chaque objet, et calcul le centre de gravité global en tenant compte du centre de gravité et de la masse de chaque objet.
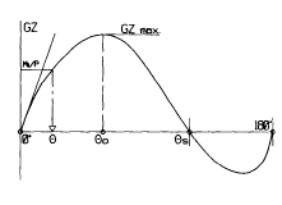
La théorie de stabilité est décrite avec précision dans la section "Architecture navale". Elle permet de comprendre quel est l'intérêt de ces paramètres d'entré. En voici un bref rappel :
 |
La densité ω est paramétrable dans le dialogue de configuration des calculs. V est le déplacement du modèle HullCAO donne GZ dans les résultats car c'est la valeur communément utilisée pour caractériser la stabilité d'un navire. Le moment du couple de redressement Mt peut aisément s'en déduire. La position du point H est aussi importante car elle détermine la stabilité de l'équilibre (si H est en dessous de G, l'équilibre est instable). |
Comportement du calcul
Les calculs en carène libre méritent un attention particulière. En effet, la position d'équilibre est déterminée par HullCAO à l'aide d'une analyse ittérative dont la bonne convergence est déterminée par les données d'entrée.
Pour la première position d'analyse, les itérations prennent comme valeurs initiales pour le pilonnement et le tangage celles données par la position de la surface dans la vue 3D isométrique. Il est judicieux que ces valeurs soient relativement proches du résultat probable pour cette première position d'analyse. Eviter par exemple de laisser une valeur de tangage de 30° dans la vue 3D isométrique si le résultats doit plutôt se situer autour de 1°. Pour les autes positions d'analyse, les valeurs initiales sont celles de la position précédente : il faut donc éviter à tout prix les calculs où 2 positions successives sont très éloignées (par exemple en roulis de 0 à 90° en 3 positions).
La convergence en pilonnement est en général assez bonne si tant est que l'on ne donne pas des valeurs initiales qui font sortir la carène de l'eau.
La convergence en tangage est plus sensible et il est parfois nécessaire de faire plusieurs essais avant de trouver des paramètres corrects.
La fenêtre graphique à droite du rapport de calcul (en environnement 4 vues uniquement) est mise à jour en temps réel lors des calculs. C'est un bon moyen de vérifier la convergence des itérations. En cas de stagnation du calcul sur une position d'analyse, il est possible d'interrompre le calcul :

Le calcul "en roulis" détermine les valeurs suivantes :
|
|
|


Ces valeurs sont, pour certaines, présentées dans le rapport d'analyse en roulis. Par défaut, le rapport ne montre que certaines valeurs (les plus importantes dans le cas général). Pour modifier le contenu du rapport, il est nécessaire de personnaliser le rapport de calcul.
Résultats du calcul en tangage
Le calcul "en roulis" détermine les valeurs suivantes :
|
|
|
Résultats du calcul en pilonnement
Le calcul "en roulis" détermine les valeurs suivantes :
|
|
|